2.7.机器人SLAM-建图与导航¶
发布里程计的TF变换¶
在trd_driver驱动的ROS主循环中,加入发布base_link–>odom之间的TF变换的代码。
# 发布里程的tf变换
self.tf_broadcaster.sendTransform(
(self.x,self.y,0),
tf.transformations.quaternion_from_euler(0, 0, self.theta),
rospy.Time.now(),
'base_link',
'odom')
利用激光进行建图¶
建图框架如下图所示:
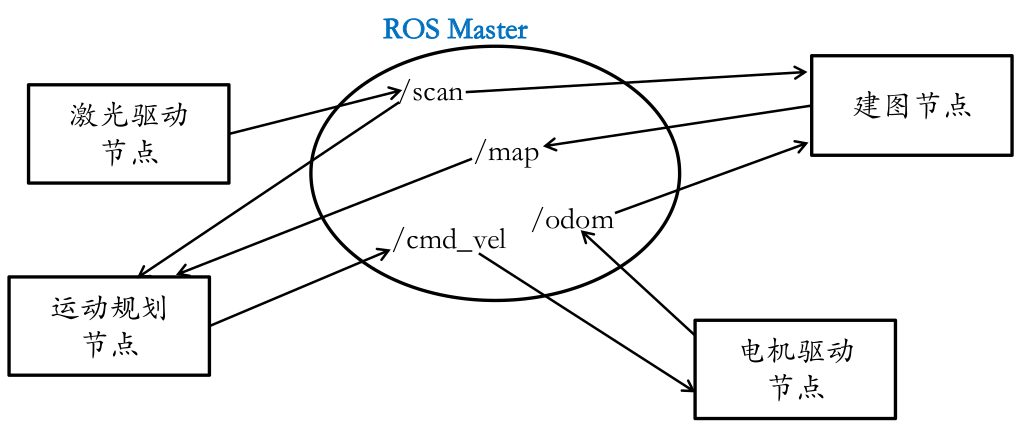
现在,我们已经实现了电机驱动节点、激光驱动节点的编写和安装。接下来需要加入建图节点实现完整的建图功能。
- 电机驱动节点(trd_driver.py)
针对不同的驱动,需要启动不同的电机驱动。 在此,我们采用前几课开发的针对坦克底盘的驱动,trd_driver包下的trd_driver.py节点。
- 激光驱动节点(ls01d)
在此,激光传感器采用深圳镭神开发的ls01d型号,请参照之前课程驱动包的安装及启动方法。
- 建图节点(gmapping或hector_mapping)
建图节点读取电机驱动节点发布的/odom里程计消息,以及激光驱动节点发布的/scan激光数据消息,即可完成建图,输出/map地图消息。 ROS中常用的移动底盘建图算法有gmapping和hector_mapping,两者的ROS地址为:
http://wiki.ros.org/slam_gmapping
http://wiki.ros.org/hector_mapping
安装方式即通过apt install指令安装:
$ sudo apt install ros-kinetic-slam-gmapping
$ sudo apt install ros-kinetic-hector-mapping
可通过rosrun指令启动:
$ rosrun gmapping slam_gmapping
$ rosrun hector_mapping hector_mapping
当然,最好的方式是在launch文件中统一启动。
手动遥控方式建图¶
在使用底盘进行建图时,可通过键盘遥控的方式,控制底盘扫描周围环境,实现建图。 此时,只需启动电机驱动节点、激光驱动节点以及建图节点即可,将3个节点在一个launch文件中启动, launch文件内容如下:
<?xml version="1.0"?>
<launch>
<param name="use_sim_time" value="false" />
<include file="$(find trd_driver)/launch/trd_control.launch">
<arg name="serialport" value="/dev/motor_trd" />
</include>
<include file="$(find ls01d)/launch/ls01d.launch" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" />
</launch>
在树莓派启动mapping.launch文件,然后在笔记本电脑启动RViz进行查看。
$ roslaunch trd_driver mapping.launch
$ rviz
地图的保存¶
在建图过程中,随时可以执行map_server包下的map_saver节点完成地图的保存。
$ rosrun map_server map_saver
默认会保存为map.yaml和map.pgm文件。
打开map.yaml文件,查看文件内容,了解其参数的意义。
运动规划节点¶
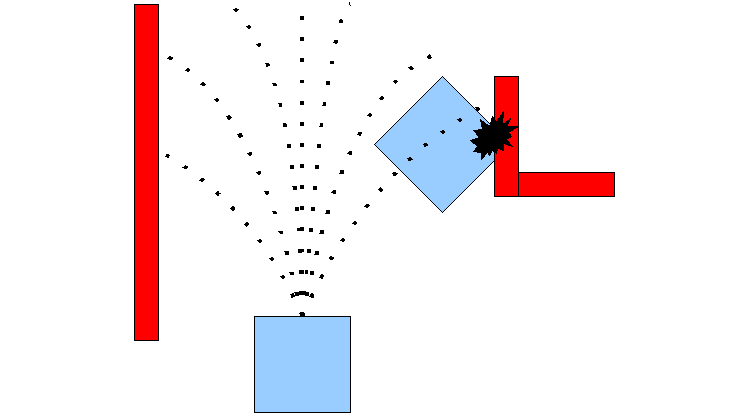
运动规划完成的功能为:接收到目标点后,结合当前地图信息,以及激光等传感器检测到的障碍物信息, 规划出如何到达目标点的路径(称为全局路径),同时避开沿途障碍物。并能根据全局路径, 计算出每一时刻底盘应该行进的角度及方向(称为局部路径)。
在ROS的navigation地面导航包中,其核心是运动规划节点,即move_base。
安装navigation超包(即一系列相关功能包组成的包)后,会安装move_base包及节点。
$ sudo apt install ros-kinetic-navigation
由于move_base节点启动时,需要加载很多算法参数,所以通常会在launch文件中启动, 并指定其yaml参数配置文件。
建图后,在已有地图上进行导航¶
与建图功能的launch文件相比,导航功能不需要建图节点了,但需要具备以下节点:
- 电机驱动节点(trd_driver.py)
- 激光驱动节点(ls01d)
- 地图文件发布节点(map_server)
- 机器人定位节点(amcl)
- 运动控制节点(move_base)
在trd_driver包的launch文件夹下,新建navigation.launch文件,并将各节点调用添加到launch文件中:
<?xml version="1.0"?>
<launch>
<param name="use_sim_time" value="false" />
<include file="$(find trd_driver)/launch/trd_control.launch">
<arg name="serialport" value="/dev/motor_trd" />
</include>
<include file="$(find ls01d)/launch/ls01d.launch" />
<node pkg="map_server" type="map_server" name="map_server"
args="$(find trd_driver)/maps/map.yaml" />
<node pkg="amcl" type="amcl" name="amcl" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find trd_driver)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find trd_driver)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find trd_driver)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find trd_driver)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find trd_driver)/config/base_local_planner_params.yaml" command="load" />
</node>
</launch>
launch文件以来4个配置文件,里面设定了算法配置等参数, 在trd_driver包下新建config文件夹,并在config文件夹下加入以下4个文件:
- costmap_common_params.yaml
bstacle_range: 2.5
raytrace_range: 3.0
#robot_radius: 0.32
footprint: [[0.3,0.25], [0.3,0], [0.3,-0.25],[-0.3,-0.25],[-0.3,0.25]]
max_obstacle_height: 0.6
min_obstacle_height: 0.0
obstacle_layer:
observation_sources: laser_scan_sensor
laser_scan_sensor:
data_type: LaserScan
topic: scan
marking: true
clearing: true
expected_update_rate: 0
- local_costmap_params.yaml
local_costmap:
inflation_radius: 0.25
global_frame: /odom
robot_base_frame: /base_link
update_frequency: 2.0
publish_frequency: 1.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.025
transform_tolerance: 1.0
map_type: costmap
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
# - {name: range_sensor_layer, type: "range_sensor_layer::RangeSensorLayer"}
# - {name: inflation_layer, type: "costmap_2d::InflationLayer"}
- global_costmap_params.yaml
global_costmap:
inflation_radius: 0.25
global_frame: /map
robot_base_frame: /base_link
update_frequency: 1.0
publish_frequency: 1.0
static_map: true
rolling_window: false
resolution: 0.025
transform_tolerance: 1.0
map_type: costmap
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
- base_local_planner_params.yaml
planner_frequency: 0.3
controller_frequency: 2.0
recovery_behavior_enabled: true
clearing_rotation_allowed: true
controller_patience: 60
recovery_behaviors:
- name: 'conservative_reset'
type: 'clear_costmap_recovery/ClearCostmapRecovery'
- name: 'aggressive_reset'
type: 'clear_costmap_recovery/ClearCostmapRecovery'
conservative_reset:
reset_distance: 1.0
aggressive_reset:
reset_distance: 0.0
TrajectoryPlannerROS:
max_vel_x: 0.35
min_vel_x: 0.0
max_vel_y: 0.0 # zero for a differential drive robot
min_vel_y: 0.0
max_vel_theta: 0.5
min_vel_theta: -0.5
min_in_place_vel_theta: 0.3
escape_vel: -0.1
acc_lim_x: 1.0
acc_lim_y: 0.0 # zero for a differential drive robot
acc_lim_theta: 3.2
holonomic_robot: false
yaw_goal_tolerance: 0.2 # about 6 degrees/0.1
xy_goal_tolerance: 0.3 #
latch_xy_goal_tolerance: false
pdist_scale: 0.8
gdist_scale: 0.4
meter_scoring: true
heading_lookahead: 1.0
heading_scoring: false
heading_scoring_timestep: 0.8
occdist_scale: 0
oscillation_reset_dist: 0.05
publish_cost_grid_pc: false
prune_plan: true
sim_time: 3.0
sim_granularity: 0.025
angular_sim_granularity: 0.025
vx_samples: 16
vy_samples: 0 # zero for a differential drive robot
vtheta_samples: 30
dwa: true
simple_attractor: false
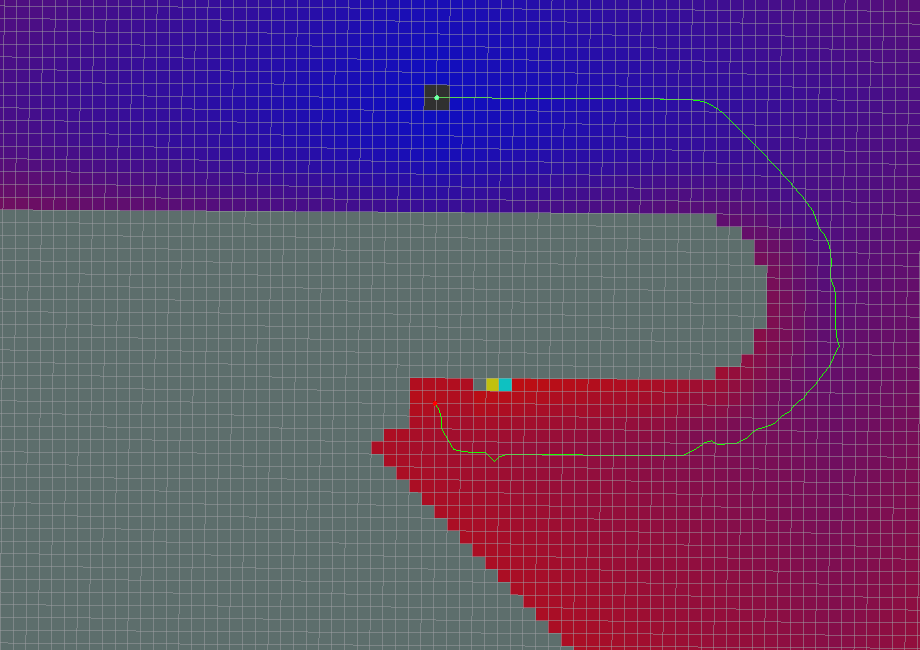
在树莓派启动navigation.launch文件,然后在笔记本电脑启动RViz进行查看。
$ roslaunch trd_driver navigation.launch
$ rviz
点击RViz界面的Nav Goal按钮,并在地图上设置目标位置,底盘即可自动导航至指定位置。
move_base原理¶
- 全局规划算法
功能:已知起始点、目标点、地图,计算出起始点到目标点的路径。
输出:一条路径(/plan),消息类型nav_msgs/Path
- 局部规划算法
功能:已知全局规划路线,计算底盘的实时运动速度,保证能够按照路线行走。
输出:运动速度(/cmd_vel),消息类型geometry_msgs/Twist
另一种建图方式:自动探索式建图¶
只需要在mapping.launch文件中加入move_base节点即可。
<?xml version="1.0"?>
<launch>
<param name="use_sim_time" value="false" />
<include file="$(find trd_driver)/launch/trd_control.launch">
<arg name="serialport" value="/dev/motor_trd" />
</include>
<include file="$(find ls01d)/launch/ls01d.launch" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find trd_driver)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find trd_driver)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find trd_driver)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find trd_driver)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find trd_driver)/config/base_local_planner_params.yaml" command="load" />
</node>
</launch>
点击RViz界面的Nav Goal按钮,并在地图上设置目标位置,底盘即可一边建图,一边自动导航至指定位置。