ROS_Introduction¶
ROS简介¶
ROS的应用
PR2个人助理

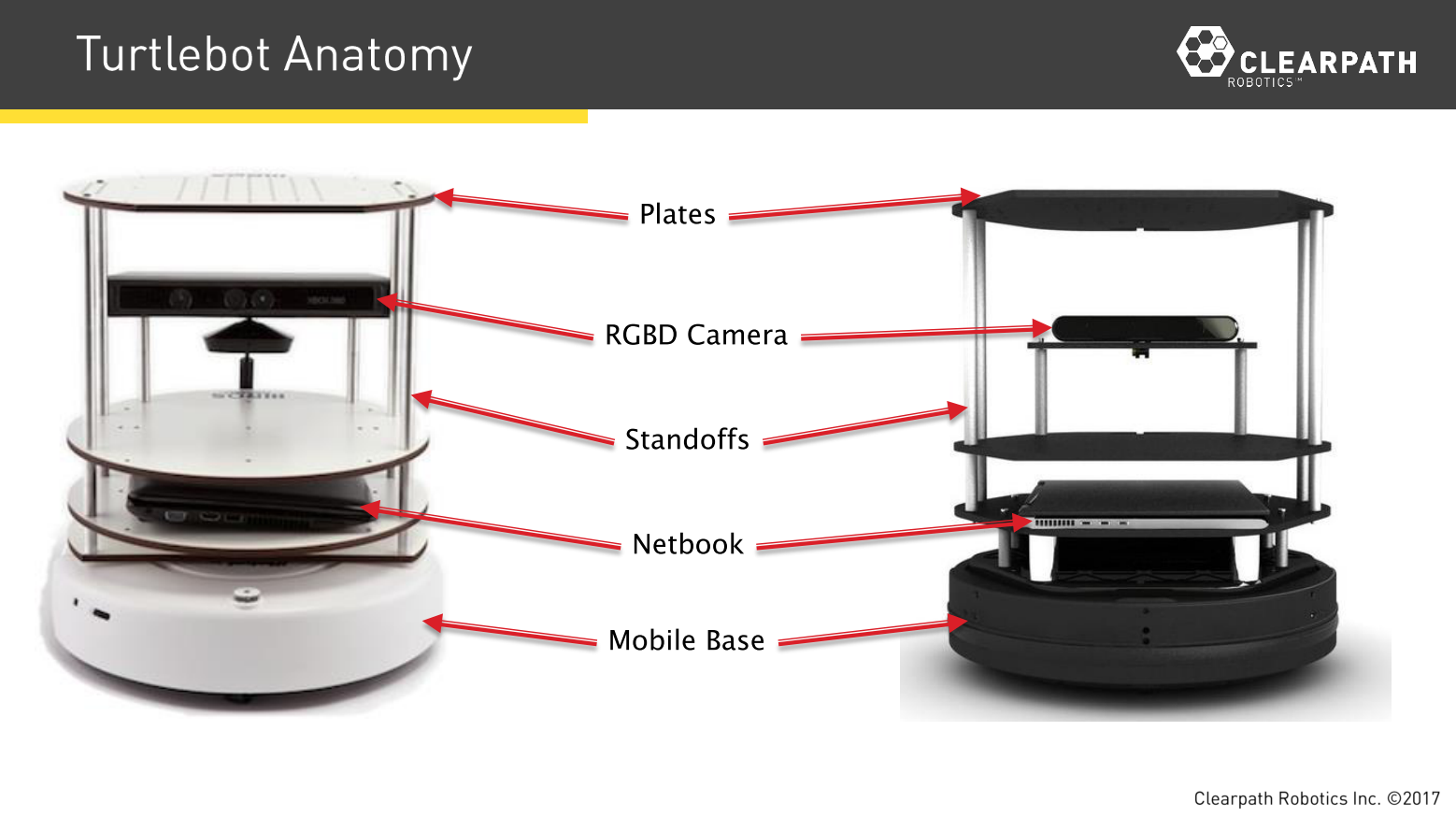
Turtlebot移动机器人
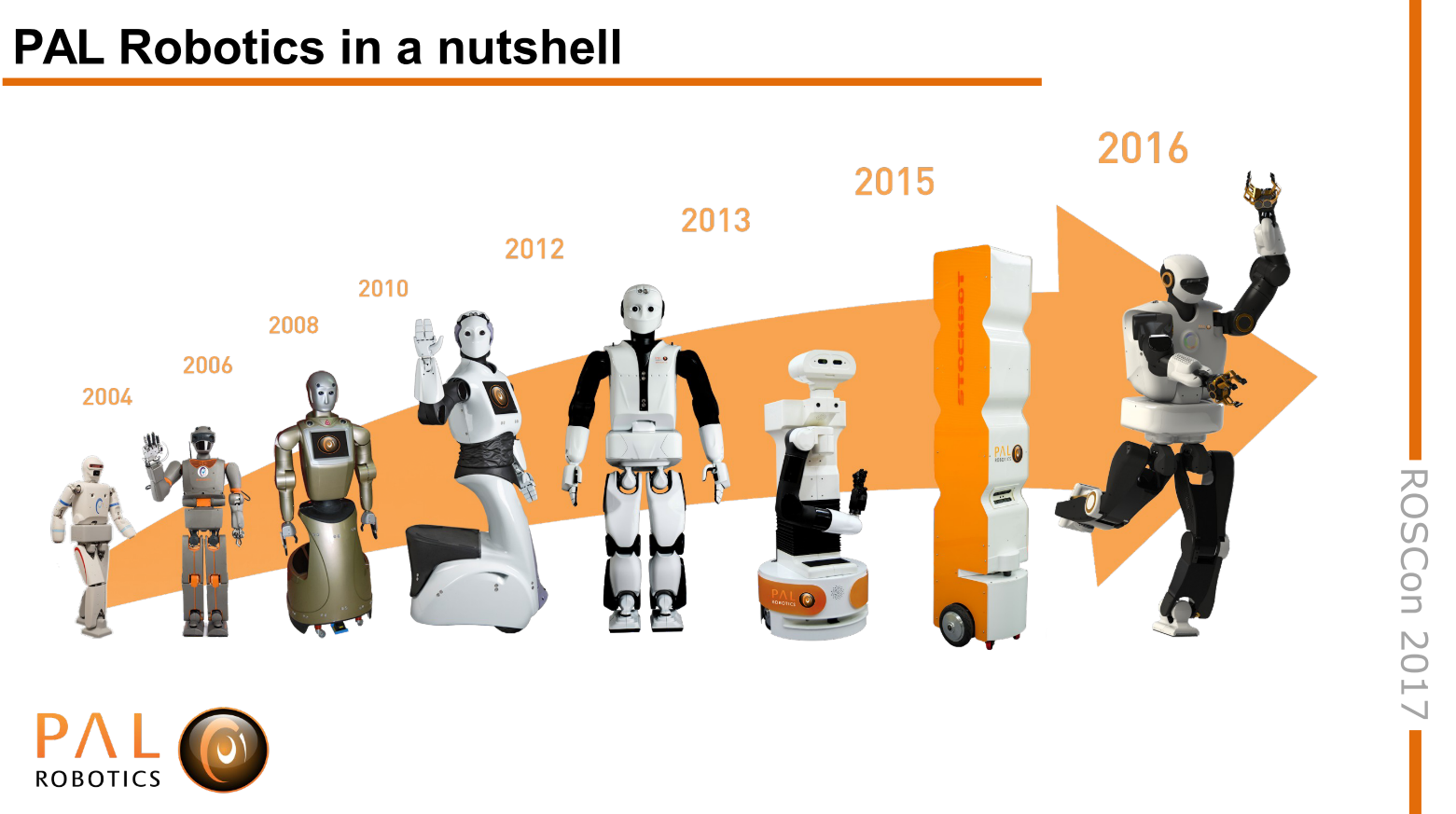
PAL人形机器人
NASA太空机器人

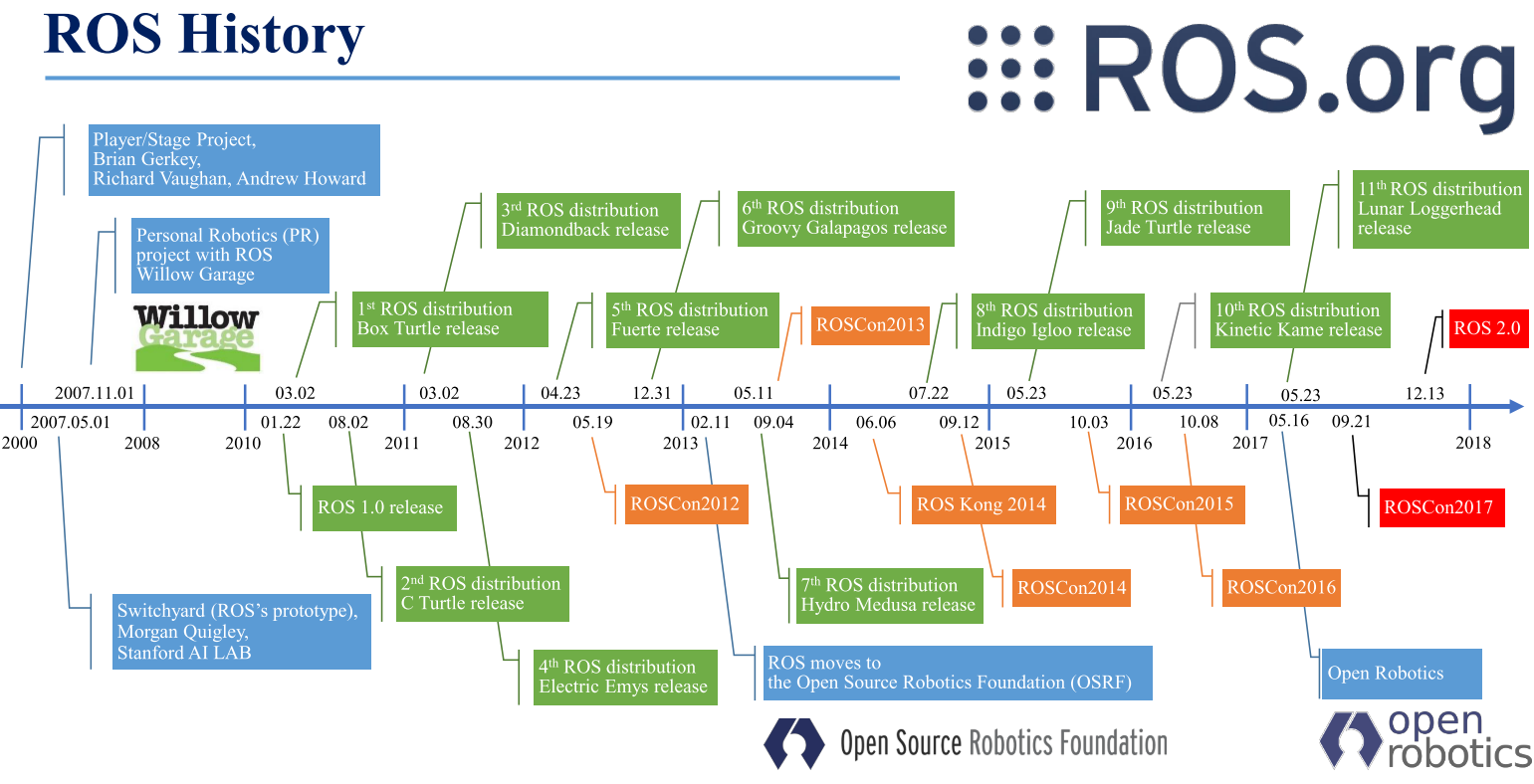
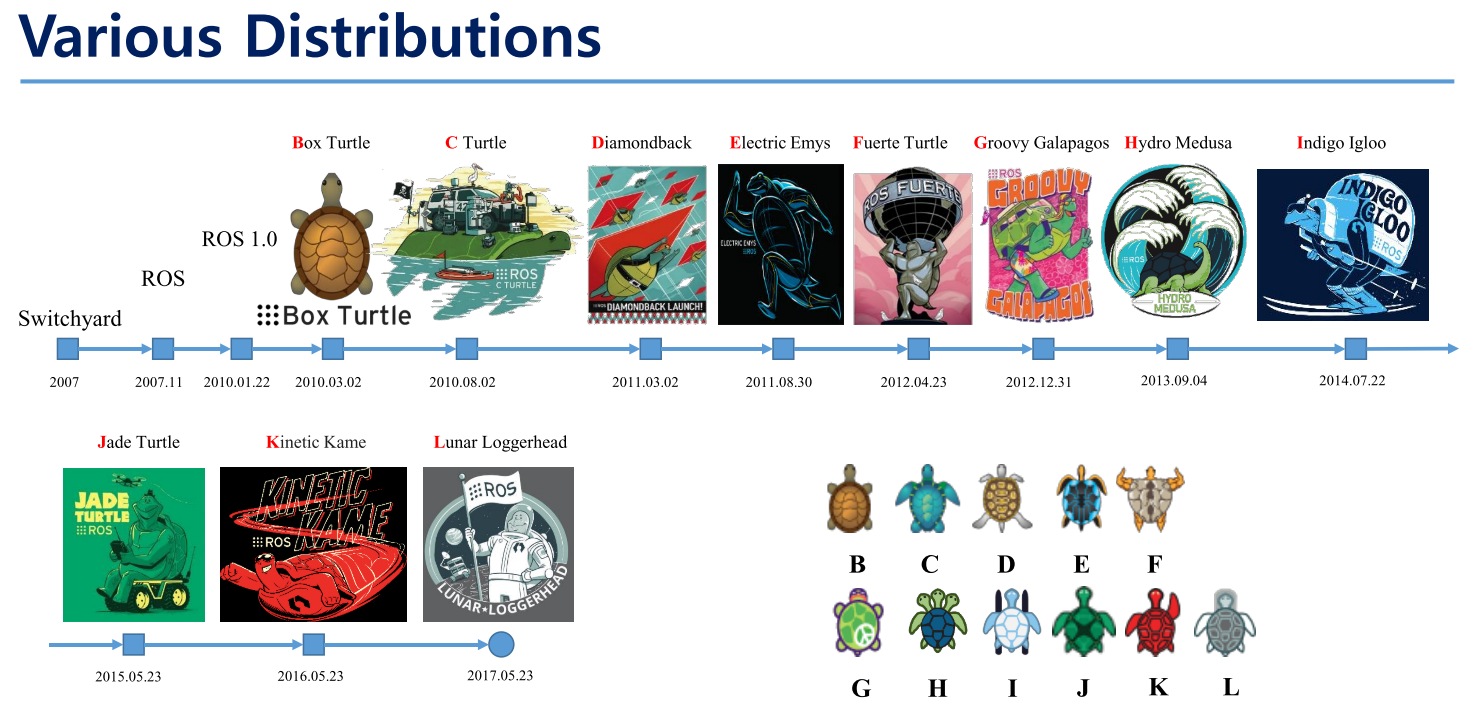
ROS的发展历史
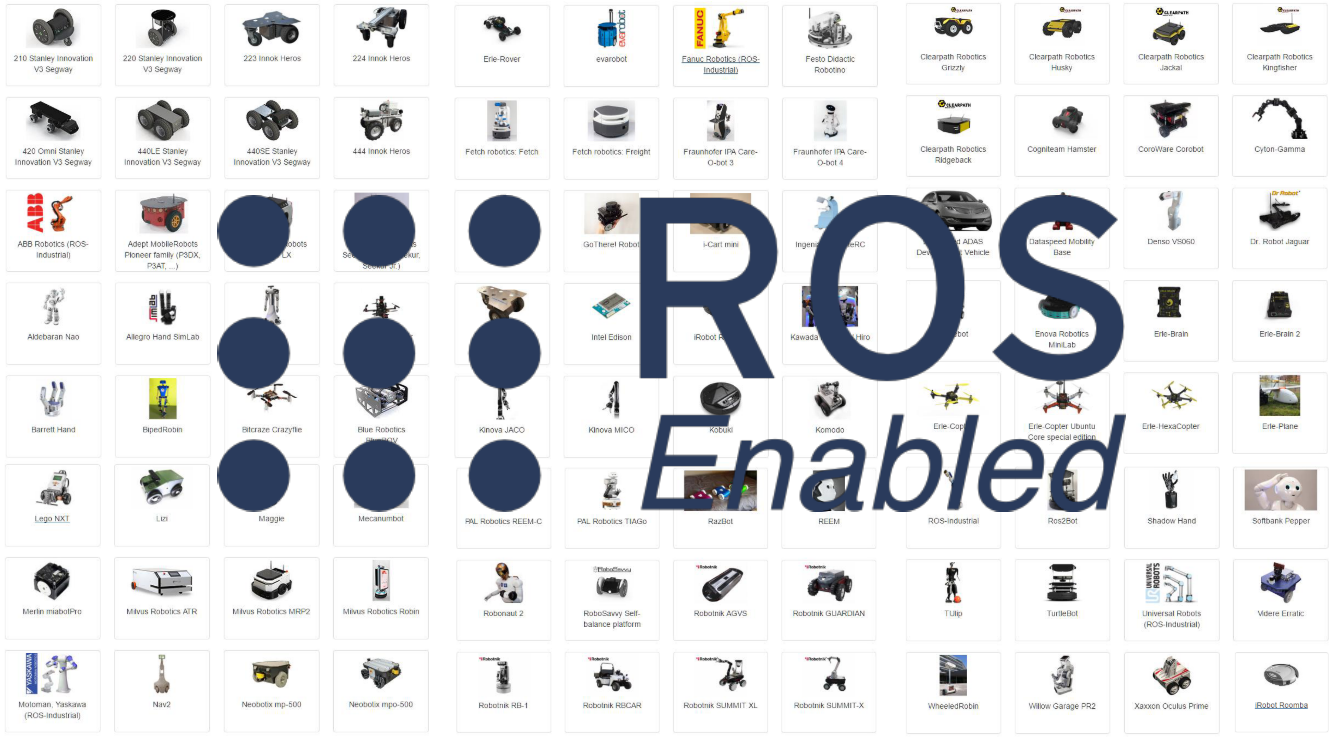
Powering the world’s robots—机器人软件的事实标准
ROS概念¶
ROS:Robot Operating System 机器人操作系统
- ROS是面向机器人的开源的元操作系统(meta-operating system)
- 提供类似传统操作系统的诸多功能:硬件抽象、底层设备控制、常用功能实现、进程间消息传递、程序包管理等。
- 提供相关工具和库,用于获取、编译、编辑代码以及在多个计算机之间运行程序完成分布式计算
ROS为机器人软件开发带来的优势:
- 分布式计算:点对点,解决进程间通讯问题
- 软件复用:算法,通信接口, 避免重复造轮子
- 快速测试:工具,模块化,数据记录与回放
- 免费开源:ROS软件的开发自始至终采用开放的BSD协议,开源社区

ROS安装¶
我们以ROS Kinetic版本为例看一下ROS的安装及配置。
- Ubuntu软件配置:勾选universe, restricted, multiverse选项

- 添加sources.list:将镜像添加到Ubuntu系统源列表中
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
- 添加keys:公钥是Ubuntu系统的一种安全机制,ROS安装不可缺少
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
- 系统更新:确保Debian软件包和索引是最新的
$ sudo apt-get update && sudo apt-get upgrade
- 安装ROS:四种安装方式,推荐桌面完整版
$ sudo apt-get install ros-kinetic-desktop-full
ROS配置¶
- 初始化rosdep:
- rosdep可在需要编译某些源码的时候为其安装一些系统依赖 rosdep也是某些ROS核心功能组件所必须用到的工具
$ sudo rosdep init && rosdep update
- ROS环境配置: 添加到bashrc文件中
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
- 安装rosinstall: ROS中独立分开的常用命令行工具,通过一条命令就可以给某个ROS软件包下载很多源码树。
$ sudo apt-get install python-rosinstall
- 更多ROS安装相关的信息可参考以下链接:
- http://wiki.ros.org/kinetic/Installation/Ubuntu