ROS Computation Graph¶
ROS计算图概念¶
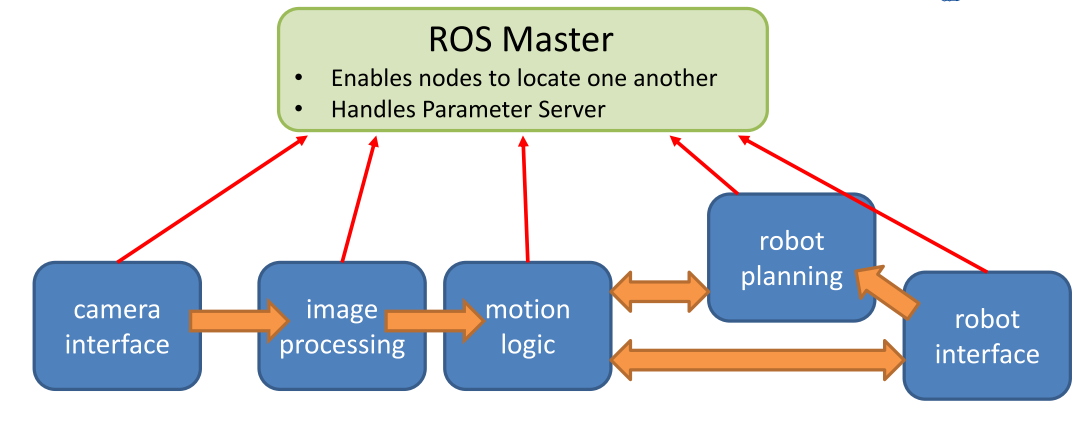
ROS计算图级概念是理解ROS应用的最重要的概念,可以认为ROS计算图是对运行时的ROS应用的形象化表示。
在底层,ROS计算图由ros_comm库实现,包含Master、Node、Topic、Service、Parameter Server等概念的实现。。
下图是一个典型的ROS计算图,我们可以看到用ROS实现的机器人视觉应用项目数据流向。
Node:
- ROS的最小进程单元
- 从程序角度来说,就是一个可执行文件被执行,加载到了内存之中
- 从功能角度来说,通常一个node负责机器人的某一个单独的功能
- ROS Node通过Topic、Service、Action进行通信
- ROS Node通常由C++或Python实现
Master:
- 节点管理器,在整个网络通信架构里相当于管理中心,管理各个node
- Node首先在master处进行注册,然后进入整个ROS网络
- Master引导各个相关节点建立直接的连接(数据的传输不经过Master),实现分布式计算节点间的通信
- ROS程序启动时,第一步先启动master,随后启动node
ROS应用的启动¶
1. 启动Master
打开终端,输入:
roscore
运行roscore命令将启动ROS master,同时启动rosout和parameter server
rosout:负责日志输出的节点,告知用户当前系统的状态,输出系统的error、warning等,并将log记录于日志文件中
parameter server:参数服务器,并不是node,而是存储参数配置的一个服务器
注意: 如果Master在ROS工程启动之后停止或重启,之前启动的节点仍然能正常进行通信。但这些节点将在不会试图与重启之后Master重连,Master不会有之前已经启动的节点的信息,所以不能帮助后续启动的节点与之前启动的节点建立通信连接。
2. 启动Node
可通过以下方式启动节点:
rosrun pkg_name node_name
也可使用以下方式启动同一个节点的多个副本,否则,如果试图启动跟已启动的节点具有相同名字的新节点,会将原有的节点关闭。
rosrun pkg_name node_name __name:=new_name
注意: 如果使用Ctrl-C命令终止节点,通常不会在Master中注销该节点,这样已终止的节点信息依然可以通过rosnode命令查看,可以使用rosnode cleanup命令清除注销节点的残留信息;另外如果使用rosnode kill指令关闭节点,通常不会发生上述现象。
ROS计算图示例¶
- 首先启动Master
roscore
- 然后启动turtle模拟器节点
rosrun turtlesim turtlesim_node #启动turtle模拟器
- 接下来启动turtle控制节点
rosrun turtlesim turtle_teleop_key #通过turtle控制节点,我们可以控制模拟器中的turtle运动
- 通过rqt node graph查看运行时ROS应用的计算图
rqt
在终端中输入rqt,随后在弹出的界面的Plugins中选择Node Graph即可看到下图所示的ROS计算图。
我们可以看到/teleop_turtle Node和/turtlesim Node通过/turtle1/cmd_vel Topic进行通信。

ROS Node 命令行工具¶
ROS提供了一些命令行工具帮助我们查看Node的信息,最常用的是:
rosnode list #列出当前正在运行的Nodes
rosnode info <node_name> #查看指定Node的信息
更多ROS Node的命令行工具可通过在终端中输入 rosnode -h 查看
更多ROS计算图相关的概念可以参考以下内容: