2.2.RoboWare Studio安装及使用¶
RoboWare Studio介绍¶
RoboWare Studio是一个ROS集成开发环境。它使ROS开发更加直观、简单,并且易于操作。可进行ROS工作区及包的管理,代码编辑、构建及调试。
RoboWare Studio的主要特性有:
(1)易于安装及配置
下载后双击即可安装,RoboWare Studio可自动检测并加载ROS环境,无需额外配置。这种“开箱即用”的特性能够帮助开发者迅速上手。
(2)辅助ROS开发,兼容indigo/jade/kinetic版本
RoboWare Studio专为ROS (indigo/jade/kinetic)设计,以图形化的方式进行ROS工作区及包的创建、源码添加、message/service/action文件创建、显示包及节点列表。可实现CMakelists.txt文件和package.xml文件的自动更新。
(3)友好的编码体验
提供现代IDE的重要特性,包括语法高亮、代码补全、定义跳转、查看定义、错误诊断与显示等。支持集成终端功能,可在IDE界面同时打开多个终端窗口。支持Vim编辑模式。
(4)C++和Python代码调试
提供Release、Debug及Isolated编译选项。以界面交互的方式调试C++和Python代码,可设置断点、显示调用堆栈、单步运行,并支持交互式终端。可在用户界面展示ROS包和节点列表。
(5)远程部署及调试
可将本地代码部署到远程机器上,远程机器可以是X86架构或ARM架构。可在本地机器实现远程代码的部署、构建和实时调试。
(6)内置Git功能
Git使用更加简单。可在编辑器界面进行差异比对、文件暂存、修改提交等操作。可对任意Git服务仓库进行推送、拉取操作。
(7)遵循ROS规范
从代码创建、消息定义,到文件存储路径的创建及选择等,RoboWare Studio会引导开发者进行符合ROS规范的操作,协助开发者编写高质量、符合规范的ROS包。
RoboWare Studio软件安装¶
准备¶
安装前,请查看系统环境并确认:
(1)操作系统为Ubuntu。
(2)已完成ROS的安装配置。ROS安装步骤可参照官方网站:http://wiki.ros.org/kinetic/Installation/Ubuntu
(3)可使用catkin_make构建ROS包。(若无法构建,您可能需要运行
$ sudo apt install build-essential
来安装基本构建工具。)
(4)为支持Python相关功能,需要安装pylint。
$ sudo apt install python-pip
$ sudo python -m pip install pylint
(5)为支持clang-format相关功能,需要安装clang-format-3.8或更高版本。
$ sudo apt install clang-format-3.8
安装¶
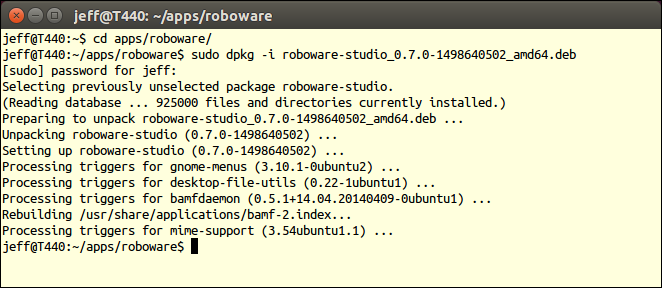
下载RoboWare Studio最新版,在终端执行以下命令进行安装:
$ cd /path/to/deb/file/
$ sudo dpkg -i roboware-studio_<version>_<architecture>.deb
其中,<version>表示软件版本号,<architecture>表示机器的处理器架构(amd64为64位版本,i386为32位版本)。 将<version>和<architecture>替换为当前文件信息即可(小技巧:可在输入“sudo dpkg -i ”后按Tab键自动补全文件名)。 安装后,RoboWare Studio会自动检测并加载ROS环境,无需额外配置。
升级¶
下载最新的RoboWare Studio安装包deb文件,参照安装步骤直接安装即可,旧版本会被自动覆盖。
启动¶
方式一(推荐): 点击屏幕左上角的Ubuntu图标,打开Dash,搜索“roboware-studio”,单击启动。
方式二: 通过终端启动,打开任一终端,执行:
$ roboware-studio
本地模式使用教程¶
(1)创建工作区¶
在欢迎界面,点击“新建工作区”按钮(或选择“文件 - 新建工作区”),选择路径并填写工作区名称,如“catkin_ws”,则会创建一个名为“catkin_ws”工作区,并显示在资源管理器窗口。
(2)打开/关闭工作区¶
在欢迎界面,点击“打开工作区”按钮(或选择“文件 - 打开工作区”),选择需要打开的ROS工作区,打开后即可显示在资源管理器窗口。
选择“文件 - 关闭工作区”,RoboWare Studio会关闭当前的工作区并返回欢迎界面。
(3)创建ROS包¶
右键点击ROS工作区下的“src”,选择“新建ROS包”,输入包名称及其依赖包的名称,如:
my_package roscpp std_msgs
回车后,会创建名为“my_package”、以“roscpp”和“std_msgs”为依赖的ROS包。
(4)添加新的动态链接库或可执行文件(ROS节点)¶
右键点击包名文件夹(如“my_package”),选择“新建Src文件夹”,会自动创建ROS标准的src源码目录,其它必要的目录也可通过此右键菜单来创建。
右键点击ROS包目录下的“src”,选择“新建CPP源文件”,输入文件名后,点击回车键,会弹出以下列表:
- 加入到新的库文件中
- 加入到新的可执行文件中
在列表中选择类型,则会创建一个与CPP文件同名的动态链接库或可执行文件(ROS节点),此时CMakeLists.txt文件会自动更新。
同理,右键点击ROS包目录下的“include/包名”,选择“新建头文件”,也可通过同样方式进行添加。
(5)添加C++源代码到动态链接库或可执行文件(ROS节点)¶
右键点击ROS包目录下的“src”,选择“新建CPP源文件”,输入文件名后,点击回车键,会弹出以下列表:
- my_library1
- my_library2
- my_executable1
- 加入到新的库文件中
- 加入到新的可执行文件中
其中my_library1、my_library2、my_executable1为已建立的库和可执行文件(节点),以列表的形式列出。 选择对应的条目(如my_executable1),CPP文件会添加到my_executable1可执行文件中。此时CMakeLists.txt文件会自动更新。
(6)编辑catkin ROS依赖包¶
右键点击包名文件夹(如“my_package”),选择“编辑依赖的ROS包列表”,加入新增的依赖包名称,如:
std_msgs
回车后,会自动修改CMakeLists.txt的依赖包列表,如依赖多个ROS包的时候需要用空格把每个依赖包隔开。
(7)添加message/service/action¶
右键点击包名文件夹(如“my_package”),选择“新建Msg文件夹”、“新建Srv文件夹”、 “新建Action文件夹”可分别创建message、service、action文件夹。 右键点击相应文件夹即可添加message、service、action文件。此时CMakeLists.txt文件会自动更新。
(8)构建工作区¶
RoboWare Studio支持catkin_make构建工具和catkin_tools构建工具。
选择菜单“文件 – 首选项 – 设置”可打开设置界面,点击“ROS - ros.buildTool”标签左侧的编辑标志,即可选择构建工具。
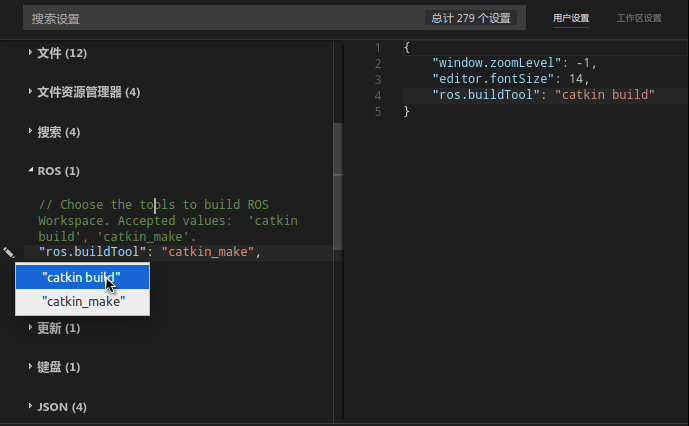
其中,Debug和Release选项分别表示构建调试版和发布版,默认构建方式为本地构建。 catkin make方式下,带有“isolated”的选项表示利用“catkin_make_isolated”命令进行构建。 带有“remote”的选项表示进行远程构建。“Remote Deploy”选项表示部署本地代码到远程计算机。 关于远程开发的具体步骤会在下一节“远程模式使用教程”介绍,在此以本地构建为例进行说明。
完成构建选项选择后,点击配置列表左侧的构建按钮,或选择“ROS”-“构建”即可构建对应版本的ROS包。构建完成后,资源管理器窗口下方的“ROS节点”子窗口会显示当前工作区下所有的ROS包及节点列表。
选择“查看 - 输出”可打开“输出”窗口,显示构建输出结果。若构建过程中出现错误,按住“CTRL”键并点击错误提示,即可跳转到源代码对应位置。
(9)构建工作区下的一个或多个包¶
默认情况下,点击“构建”按钮会构建当前工作区下的所有包。如果只想构建其中的一个或多个包,可右键点击包名,将其设置为活动状态。可同时将一个或多个包设置为活动状态。此时,不被编译的包即称为“非活动包”,在目录列表中将会以删除线标记出来。点击“构建”按钮,RoboWare Studio只会对处于活动状态的包进行构建。
(11)集成终端使用¶
选择“查看 - 集成终端”选项,可在编辑窗口下方打开集成终端窗口。集成终端默认打开路径为当前ROS工作区根目录。可在集成终端中执行任意命令行指令。
可以点击集成终端窗口右上方的“+”按钮打开新的集成终端,并在下拉列表中进入对应的集成终端。
(12)添加并启动launch文件¶
首先,右键点击包名文件夹(如“my_package”),选择“新建Launch文件夹”可创建launch文件夹。然后,右键点击launch文件夹,输入文件名添加launch文件。
编辑完后,右键launch文件,选择“运行Launch文件”即可,RoboWare Studio会自动打开集成终端并运行launch文件。
(13)编辑~/.bashrc文件¶
选择菜单“ROS – 打开~/.bashrc文件”即可打开并编辑.bashrc文件。
远程模式使用教程¶
(1)配置SSH公钥无密登录¶
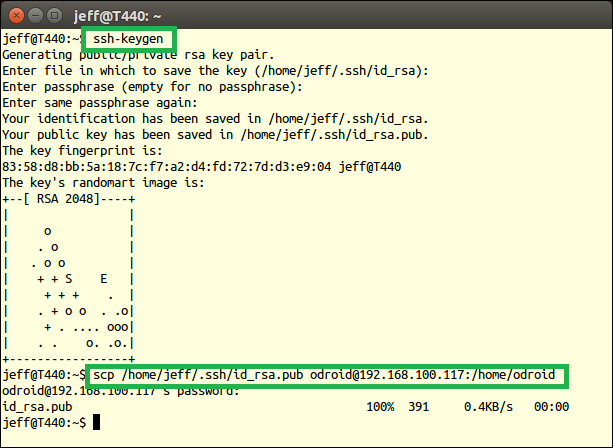
首先,在本地计算机生成公钥和私钥。打开终端,执行命令:
$ ssh-keygen
一直按回车键选择默认选项,会在~/.ssh目录下生成id_rsa和id_rsa.pub两个文件。然后将id_rsa.pub文件复制到远程计算机:
$ scp ~/.ssh/id_rsa.pub username@ip_address:/home/username
其中username为远程计算机用户名,ip_address为远程计算机的IP地址,示例如下所示。
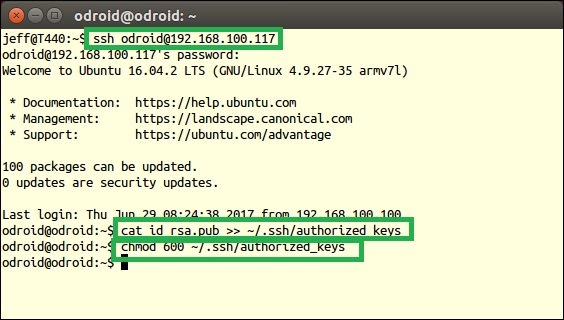
将公钥文件id_rsa.pub拷贝到远程计算机后,SSH登录到远程计算机:
$ ssh username@ip_address
其中username为远程计算机用户名,ip_address为远程计算机的IP地址。
登录后,将id_rsa.pub的文件内容追加写入到远程计算机的~/.ssh/authorized_keys文件中,并修改authorized_keys文件的权限:
$ cat id_rsa.pub >> ~/.ssh/authorized_keys
$ chmod 600 ~/.ssh/authorized_keys
配置完成后,再登录远程计算机就无需输入密码。接下来,即可配置RoboWare Studio的远程调试参数进行远程调试。
(2)修改远程计算机/etc/profile¶
首先,登录远程计算机:
$ ssh username@ip_address
其中username为远程计算机用户名,ip_address为远程计算机的IP地址。
登录后,切换到root用户权限,将ROS环境变量信息写入到/etc/profile文件中:
$ sudo su
$ echo "source /opt/ros/kinetic/setup.bash" >> /etc/profile
在此需要注意,示例中的ROS版本为“kinetic”,对于其它版本替换为对应名称即可。
(3)远程参数配置¶
启动RoboWare Studio后,点击“远程参数配置”按钮,依次配置远程计算机IP地址、远程计算机用户名、本地计算机密钥文件、远程计算机部署路径参数。
(4)远程部署¶
完成远程参数配置后,再进行远程部署。
首先,在资源管理器视图下,选择“Remote Deploy”远程部署选项,点击列表左侧的按钮进行远程部署。RoboWare Studio会将当前整个工作区的源代码部署到远程计算机的指定路径下(请参照上一节的“远程参数配置”进行远程部署路径的设置)。
在远程部署过程中,左下角状态栏图标会跳动。部署完成后,会在“输出”窗口显示部署成功的信息(Deploy Finished!)。
(5)远程构建¶
完成远程部署后,即可进行远程构建。远程构建与本地构建一样,可以选择catkin_make和catkin_tools两种构建方式,若选择catkin_tools构建方式,需要在远程机器上安装catkin_tools工具。在此仅以catkin_make构建方式进行说明。
首先,在资源管理器视图下,选择“Debug (remote)”构建选项,点击列表左侧的按钮进行远程构建。RoboWare Studio会将构建指令发送到远程计算机,并在“输出”窗口显示构建信息。
(6)远程清理¶
远程构建完成后,资源管理器窗口下方的“ROS节点”子窗口会显示远程工作区下所有的ROS包及节点列表。
点击“ROS节点”子窗口上的“清理”按钮,则会对远程构建结果进行清理。
在此需要注意,点击“清理”按钮,左上角的配置构建选项中如果为“remote”选项,则会清除远程构建结果,否则,则清除本地构建结果。
(7)远程部署/构建一个或多个包¶
默认情况下,部署时会将当前工作区下的所有包部署到远程主机。如果只想部署其中的一个或多个包,可右键点击包名,将其设置为活动状态。可同时将一个或多个包设置为活动状态。此时,进行部署时,RoboWare Studio只会将处于活动状态的包部署到远程主机。
与本地构建方式相同,当设置一个或多个活动包时,点击“构建”按钮,只会对处于活动状态的包进行构建。当清除所有包的活动状态后,则会回到初始状态(即所有包都处于非活动状态)。当所有包都处于非活动状态时,点击“构建”按钮,则会对当前工作区内的所有包进行构建。
(8)远程启动launch文件¶
右键launch文件,选择“在远程主机上运行Launch文件”,RoboWare Studio会在集成终端中启动远程主机的launch文件。在集成终端中使用“Ctrl + c”快捷键可终止运行。
软件首选项配置¶
RoboWare Studio软件可方便地进行的首选项配置,以点选的方式实现用户配置、工作区配置以及主题配置等。选择“文件 – 首选项 – 设置”即可打开配置界面。
FAQ¶
(1)如何导入已有的ROS工作区?
分两种情况:
- 对于普通的ROS工作区,直接在欢迎界面点击“打开工作区”按钮(或在菜单中选择“文件 - 打开工作区”),选择工作区路径打开即可。
- 对于旧版本RoboWare Studio打开过的ROS工作区,需要将工作区根目录下的“.vscode”文件夹删除,再打开工作区即可。
(2)如何进行软件升级?
下载最新的RoboWare Studio安装包deb文件,参照安装步骤直接安装即可,旧版本会被自动覆盖。
(3)如何修改界面语言?
在菜单栏中,选择“文件-首选项-语言设置”,打开配置文件。
"locale":"zh-CN" 表示设置为中文界面,
"locale":"en" 表示设置为英文界面,
可用“//”进行注释。修改完成后,重启RoboWare Studio即可生效。
(4)新建工作区时提示“路径不是ROS工作区”。
可能原因为ROS环境变量未导出。安装完ROS后,需要在当前用户家目录下的.bashrc文件中添加以下内容:
source /opt/ros/indigo/setup.bash #(indigo版)
或
source /opt/ros/kinetic/setup.bash #(kinetic版)
ROS的安装及配置说明可参照官网教程:
http://wiki.ros.org/indigo/Installation/Ubuntu (indigo版)
http://wiki.ros.org/kinetic/Installation/Ubuntu (kinetic版)
(5)提示错误“Linter pylint is not installed”。
需要安装pylint,请参照本手册“软件安装”-“准备”中的步骤。打开命令行终端,执行以下命令:
$ sudo apt install python-pip
在集成终端中安装python插件时会提示输入root密码,请按照提示输入。
(6)提示系统git版本低的问题。
需要升级git。打开命令行终端,执行以下命令:
$ sudo apt-add-repository ppa:git-core/ppa
$ sudo apt update
$ sudo apt install git
(7)名为“test”的节点无法生成问题。
不要将ROS节点名称命名为test,否则会无法生成节点。
(8)构建过程中卡住问题。
对于内存太小的机器,如果当前工作区内的ROS包数量太多,在构建整个工作区时,会因内存不足导致构建卡住。此时,可采用单独构建的方式依次对每个包构建。
(9)新建、删除文件时资源管理器不能自动刷新。
RoboWare Studio依靠ubuntu的文件系统监视功能实现资源管理器的自动刷新, 但ubuntu的文件监视数量限制可能设置的太小,导致资源管理器没有自动刷新。 为解决这个问题需要设置ubuntu的文件监视数量限制。方法如下:
使用root权限打开文件/etc/sysctl.conf进行编辑。
$ sudo gedit /etc/sysctl.conf
也可用其它文本编辑器。
找到fs.inotify.max_user_watches选项,适当增加等号后面的数值,比如改为100000。重启ubuntu即可。
(10)编辑器无法输入、选择、复制问题。
这是因为RoboWare Studio处于Vim编辑模式,切换到普通模式即可,在菜单栏选择“编辑-切换VIM编辑模式”可切换到普通编辑模式。
(11)编辑时如何进行前进、后退?能否自定义其快捷键?
默认的前进快捷键为“Ctrl+Shift+-”,后退快捷键为“Ctrl+Alt+-”。 可以进行快捷键自定义,点击菜单栏的“文件 - 首选项 – 键盘快捷方式”,找到“前进”、“后退”选项进行修改即可,也可对其它快捷键进行自定义。
(12)CMakelists.txt错误无法定位问题。
先删除工作区根目录.vscode文件夹下的tasks.json文件,然后重新打开工作区。
(13)Meta Package无法编辑依赖、无法新建节点问题。
目前尚不支持meta package编辑依赖和新建节点,将meta package下的所有包拷贝到src目录下即可。