2.3.让底盘动起来!差速控制模型及串口驱动编写¶
本节将编写一个差速底盘的驱动程序,采用串口通信方式,主要实现以下功能:
- 订阅ROS其它节点发布的速度指令,控制底盘运行;
- 读取底盘两个轮子的编码器数据,并解算成底盘的位置坐标。
用Python写一个简单的ROS发布者节点¶
首先,在trd_driver包的src目录下编写一个用Python写的ROS节点,命名为trd_driver.py,此节点以10Hz的频率,将ROS中nav_msgs包下的Odometry类型消息发布到名为/odom的主题上。
Odometry消息类型定义可查看ROS官方文档http://docs.ros.org/api/nav_msgs/html/msg/Odometry.html。
注意:需将trd_driver.py文件添加执行权限后才可运行:
$ roscd trd_driver/src/
$ chmod +x trd_driver.py
#!/usr/bin/python2
import rospy
from nav_msgs.msg import Odometry
if __name__=='__main__':
rospy.init_node('trd_driver_node')
odom_pub = rospy.Publisher('/odom', Odometry, queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
current_odom = Odometry()
odom_pub.publish(current_odom)
rate.sleep()
此时,先启动roscore,然后打开新的终端,执行:
$ cd ~/catkin_ws/src/trd_driver/src/
$ ./trd_driver.py
另一种执行方式是用rosrun指令,此命令可在任意路径下执行,无需进入到trd_driver.py所在路径。
$ rosrun trd_driver trd_driver.py
运行此节点后,利用rostopic命令查看节点发布的主题:
$ rostopic list
$ rostopic echo /odom
此时,可看到终端不停地打印出/odom主题,由于未对其赋值,所以默认值均为0。
在节点中添加速度订阅者,并接收键盘控制的速度指令¶
然后,在节点文件中加入一个订阅者,订阅名为/cmd_vel主题的消息,消息类型为geometry_msgs包下的Twist类型,为ROS中专门描述速度的消息。
Twist消息类型定义可查看ROS官方文档http://docs.ros.org/api/geometry_msgs/html/msg/Twist.html。
#!/usr/bin/python2
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Twist
def vel_callback(msg):
print(msg.linear.x, msg.angular.z)
if __name__=='__main__':
rospy.init_node('trd_driver_node')
odom_pub = rospy.Publisher('/odom', Odometry, queue_size=10)
vel_sub = rospy.Subscriber('/cmd_vel', Twist, vel_callback)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
current_odom = Odometry()
odom_pub.publish(current_odom)
rate.sleep()
然后,在src目录下新建名为keyboard_teleop.py的ROS节点(记得修改执行权限),作用是将键盘控制信号发布到/cmd_vel速度主题。 (其源代码可到此处下载。)
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
import sys, select, termios, tty
msg = """
Control Your Turtlebot!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
space key, k : force stop
anything else : stop smoothly
CTRL-C to quit
"""
moveBindings = {
'i':(1,0),
'o':(1,-1),
'j':(0,1),
'l':(0,-1),
'u':(1,1),
',':(-1,0),
'.':(-1,1),
'm':(-1,-1),
}
speedBindings={
'q':(1.1,1.1),
'z':(.9,.9),
'w':(1.1,1),
'x':(.9,1),
'e':(1,1.1),
'c':(1,.9),
}
def getKey():
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
speed = 0.5
turn = 1
def vels(speed,turn):
return "currently:\tspeed %s\tturn %s " % (speed,turn)
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
rospy.init_node('teleop_key')
pub = rospy.Publisher('cmd_vel', Twist, queue_size=5)
x = 0
th = 0
status = 0
count = 0
acc = 0.1
target_speed = 0
target_turn = 0
control_speed = 0
control_turn = 0
try:
print msg
print vels(speed,turn)
while(1):
key = getKey()
if key in moveBindings.keys():
x = moveBindings[key][0]
th = moveBindings[key][1]
count = 0
elif key in speedBindings.keys():
speed = speed * speedBindings[key][0]
turn = turn * speedBindings[key][1]
count = 0
print vels(speed,turn)
if (status == 14):
print msg
status = (status + 1) % 15
elif key == ' ' or key == 'k' :
x = 0
th = 0
control_speed = 0
control_turn = 0
else:
count = count + 1
if count > 4:
x = 0
th = 0
if (key == '\x03'):
break
target_speed = speed * x
target_turn = turn * th
if target_speed > control_speed:
control_speed = min( target_speed, control_speed + 0.02 )
elif target_speed < control_speed:
control_speed = max( target_speed, control_speed - 0.02 )
else:
control_speed = target_speed
if target_turn > control_turn:
control_turn = min( target_turn, control_turn + 0.1 )
elif target_turn < control_turn:
control_turn = max( target_turn, control_turn - 0.1 )
else:
control_turn = target_turn
twist = Twist()
twist.linear.x = control_speed; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = control_turn
pub.publish(twist)
#print("loop: {0}".format(count))
#print("target: vx: {0}, wz: {1}".format(target_speed, target_turn))
#print("publihsed: vx: {0}, wz: {1}".format(twist.linear.x, twist.angular.z))
except:
print e
finally:
twist = Twist()
twist.linear.x = 0; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = 0
pub.publish(twist)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
在两个终端中分别启动trd_driver.py和keyboard_teleop.py,并通过键盘的i
, j l键盘发布速度消息,观察trd_driver.py的输出。
$ rosrun trd_driver trd_driver.py
$ rosrun trd_driver keyboard_teleop.py
将上述代码封装到类中¶
为了便于下一步开发,将所有功能封装成类比较好。
#!/usr/bin/python2
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Twist
class TrdDriver():
def __init__(self):
self.odom_pub = rospy.Publisher('/odom', Odometry, queue_size=10)
self.vel_sub = rospy.Subscriber('/cmd_vel', Twist, self.vel_callback)
def run(self):
rate = rospy.Rate(10)
while not rospy.is_shutdown():
current_odom = Odometry()
self.odom_pub.publish(current_odom)
rate.sleep()
def vel_callback(self,msg):
print(msg.linear.x, msg.angular.z)
if __name__=='__main__':
rospy.init_node('trd_driver_node')
trd_driver = TrdDriver()
trd_driver.run()
在节点中加入串口驱动程序,控制底盘转动¶
TRD电机驱动板卡采用串口控制,其通信方式如下:
I.发送¶
| 字节 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 内容 | 0xea | 0x05 | 0x7e | 速度1 | 速度2 | 校验 | 0x0d |
发送指令包含7个字节,头尾分别为0xea和0x0d,第4位、第5位分别表示两个电机的速度, 均用一个字节表示。数值为128时速度为零,大于128时电机正转,数值越大速度越快;小于 128时电机反转,数值越小速度越快。其中,第6位为前1~5位字节校验和(求异或)。
II.接收¶
每次发送速度控制指令后,电机驱动板卡都会回应以下信息。 接收到的数据包含23个字节,头尾分别为0xea和0x0d,4~21位描述了当前电机状态。 除了编码器均用一个字节来表示。两个电机编码器的数值分别用4个字节表示,为大端法表示的有符号整形。 其中,第20位为前1~19位字节校验和(求异或)。
| 字节 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| 内容 | 0xea | 0x13 | 0x7e | 电压 | 电流1 | 电流2 | 错误码 | 速度1 | 速度2 |
| 10 | 11 | 12~15 | 16~19 | 20-21 | 22 | 23 |
|---|---|---|---|---|---|---|
| 实际速度1 | 实际速度2 | 编码器1(大端int) | 编码器2(大端int) | 未用 | 校验 | 0x0d |
将底盘TRD电机驱动板卡的串口转USB线连接到电脑的USB接口,此时会出现”/dev/ttyUSB0”的串口设备。
$ ls /dev/ttyUSB*
在节点中,引入python的serial串口驱动包,打开”/dev/ttyUSB0”串口,波特率为38400。 然后根据上述通信协议,向电机驱动板卡发送速度控制指令。(可修改源码中的速度值改变电机转速)
#!/usr/bin/python2
# coding: utf-8
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Twist
import serial
class TrdDriver():
def __init__(self):
self.odom_pub = rospy.Publisher('/odom', Odometry, queue_size=10)
self.vel_sub = rospy.Subscriber('/cmd_vel', Twist, self.vel_callback)
self.ser = serial.Serial('/dev/ttyUSB0', 38400)
def send(self, cmd):
self.ser.write(cmd)
def set_speed(self, v1, v2):
cmd = [0xea, 0x05, 0x7e, v1, v2, 0x00, 0x0d]
for i in range(len(cmd)-2):
cmd[-2] ^= cmd[i]
print('send cmd:', cmd)
self.send(cmd)
def run(self):
rate = rospy.Rate(10)
while not rospy.is_shutdown():
current_odom = Odometry()
self.odom_pub.publish(current_odom)
rate.sleep()
def vel_callback(self, msg):
print(msg.linear.x, msg.angular.z)
if __name__=='__main__':
rospy.init_node('trd_driver_node')
trd_driver = TrdDriver()
trd_driver.set_speed(128, 128)
trd_driver.run()
将当前用户添加到dialout用户组¶
通常,普通用户对串口设备没有读写权限,如果存在这样的情况,一种方式是通过chmod指令修改串口权限,但这样每次重启系统要重新执行。
sudo chmod 775 /dev/ttyUSB0
要想一劳永逸,最好将当前用户添加到dialout用户组:
sudo usermod -a -G dialout $USER
利用键盘控制底盘运动¶
在订阅/cmd_vel的回调函数中,根据接收到的速度数据控制底盘运动。
其中,msg.linear.x表示前进或后退速度,单位为m/s。msg.angular.z表示旋转速度,单位为rad/s。
#!/usr/bin/python2
# coding: utf-8
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Twist
import serial
import time
class TrdDriver():
def __init__(self):
self.odom_pub = rospy.Publisher('/odom', Odometry, queue_size=10)
self.vel_sub = rospy.Subscriber('/cmd_vel', Twist, self.vel_callback)
self.ser = serial.Serial('/dev/ttyUSB0', 38400)
self.v1 = 128
self.v2 = 128
self.linear_coef = 82.0
self.angular_coef = 14.6
def send(self, cmd):
self.ser.write(cmd)
def set_speed(self, v1, v2):
cmd = [0xea, 0x05, 0x7e, v1, v2, 0x00, 0x0d]
for i in range(len(cmd)-2):
cmd[-2] ^= cmd[i]
print('send cmd:', cmd)
self.send(cmd)
def read_buffer(self):
result = ''
while self.ser.inWaiting() > 0:
result += self.ser.read(1)
return result
def run(self):
rate = rospy.Rate(10)
while not rospy.is_shutdown():
self.set_speed(self.v1, self.v2)
time.sleep(0.05)
result = self.read_buffer()
print('response:', result)
current_odom = Odometry()
self.odom_pub.publish(current_odom)
rate.sleep()
def vel_callback(self, msg):
v1 = self.linear_coef * msg.linear.x
v2 = self.linear_coef * msg.linear.x
v1 -= self.angular_coef * msg.angular.z
v2 += self.angular_coef * msg.angular.z
v1 += 128
v2 += 128
v1 = int(v1) if v1<255 else 255
v2 = int(v2) if v2<255 else 255
v1 = int(v1) if v1>0 else 0
v2 = int(v2) if v2>0 else 0
self.v1 = v1
self.v2 = v2
if __name__=='__main__':
rospy.init_node('trd_driver_node')
trd_driver = TrdDriver()
trd_driver.run()
运行脚本会打印如下消息:
('send cmd:', [234, 5, 126, 128, 128, 145, 13])
('response:', '\xea\x15~\x11\x00\t\x80\x80\x80\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x19\r')
('send cmd:', [234, 5, 126, 129, 129, 145, 13])
('response:', '\xea\x15~\x11\x00\t\x80\x81\x81\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x19\r')
('send cmd:', [234, 5, 126, 131, 131, 145, 13])
('response:', '\xea\x15~\x11\x00\t\x80\x83\x83\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x19\r')
('send cmd:', [234, 5, 126, 132, 132, 145, 13])
('response:', '\xea\x15~\x11\x00\t\x80\x84\x84\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x19\r')
('send cmd:', [234, 5, 126, 134, 134, 145, 13])
('response:', '\xea\x15~\x11\x00\t\x80\x86\x86\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x19\r')
('send cmd:', [234, 5, 126, 134, 137, 158, 13])
('response:', '\xea\x15~\x11\x00\t\x80\x86\x89\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x16\r')
('send cmd:', [234, 5, 126, 134, 140, 155, 13])
('response:', '\xea\x15~\x11\x00\t\x80\x86\x8c\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x13\r')
在两个终端中分别启动trd_driver.py和keyboard_teleop.py,并通过键盘的i
, j l键盘发布速度消息,观察底盘运动情况。
$ rosrun trd_driver trd_driver.py
$ rosrun trd_driver keyboard_teleop.py
基于双轮差速模型的底盘里程计计算¶
差速模型示意图:
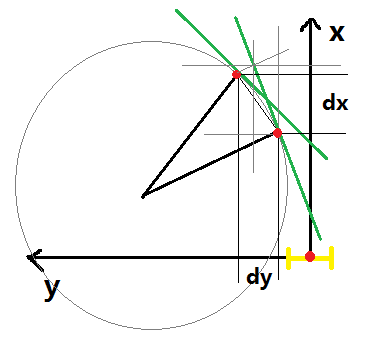
根据此模型,实现update_odom方法,可根据获取到的编码器值,计算底盘实时里程,并发布到/odom主题。
#!/usr/bin/python2
# coding: utf-8
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Twist
import tf
import serial
import time
import struct
import math
class TrdDriver():
def __init__(self, serialport, baudrate):
self.odom_pub = rospy.Publisher('/odom', Odometry, queue_size=10)
self.vel_sub = rospy.Subscriber('/cmd_vel', Twist, self.vel_callback)
self.ser = serial.Serial(serialport, baudrate)
self.v1 = 128
self.v2 = 128
self.linear_coef = 100.0
self.angular_coef = 10.0
self.wheel_diameter = 0.08
self.base_width = 0.21
self.encoder_ticks_per_rev = 1980
self.encoder1 = 0
self.encoder2 = 0
self.encoder1_prev = 0
self.encoder2_prev = 0
self.x = 0
self.y = 0
self.theta = 0
self.odom = Odometry()
self.odom.header.frame_id = 'odom'
self.odom.child_frame_id = 'base_link'
self.time_prev = rospy.Time.now()
def send(self, cmd):
self.ser.write(cmd)
def set_speed(self, v1, v2):
cmd = [0xea, 0x05, 0x7e, v1, v2, 0x00, 0x0d]
for i in range(len(cmd)-2):
cmd[-2] ^= cmd[i]
print('send cmd:', cmd)
self.send(cmd)
def read_buffer(self):
result = ''
while self.ser.inWaiting() > 0:
result += self.ser.read(1)
return result
def run(self):
rate = rospy.Rate(10)
while not rospy.is_shutdown():
self.set_speed(self.v1, self.v2)
time.sleep(0.05)
result = self.read_buffer()
print('response:', result)
#提取编码器数值
self.encoder1, = struct.unpack('>i', bytearray(result[11:15]))
self.encoder2, = struct.unpack('>i', bytearray(result[15:19]))
print('encoder:', self.encoder1, self.encoder2)
#计算新的里程计并发布
self.update_odom()
def vel_callback(self, msg):
v1 = self.linear_coef * msg.linear.x
v2 = self.linear_coef * msg.linear.x
v1 -= self.angular_coef * msg.angular.z
v2 += self.angular_coef * msg.angular.z
v1 += 128
v2 += 128
v1 = int(v1) if v1<255 else 255
v2 = int(v2) if v2<255 else 255
v1 = int(v1) if v1>0 else 0
v2 = int(v2) if v2>0 else 0
self.v1 = v1
self.v2 = v2
def update_odom(self):
encoder1 = self.encoder1
encoder2 = self.encoder2
time_current = rospy.Time.now()
time_elapsed = (time_current - self.time_prev).to_sec()
self.time_prev = time_current
dleft = math.pi * self.wheel_diameter * \
(encoder1 - self.encoder1_prev) / self.encoder_ticks_per_rev
dright = math.pi * self.wheel_diameter * \
(encoder2 - self.encoder2_prev) / self.encoder_ticks_per_rev
self.encoder1_prev = encoder1
self.encoder2_prev = encoder2
d = (dleft + dright) / 2
dtheta = (dright - dleft) / self.base_width
if d != 0:
dx = math.cos(dtheta) * d
dy = -math.sin(dtheta) * d
self.x += dx*math.cos(self.theta)-dy*math.sin(self.theta)
self.y += dx*math.sin(self.theta)+dy*math.cos(self.theta)
self.theta += dtheta
self.odom.header.stamp = time_current
self.odom.pose.pose.position.x = self.x
self.odom.pose.pose.position.y = self.y
q = tf.transformations.quaternion_from_euler(0,0,self.theta)
self.odom.pose.pose.orientation.x = q[0]
self.odom.pose.pose.orientation.y = q[1]
self.odom.pose.pose.orientation.z = q[2]
self.odom.pose.pose.orientation.w = q[3]
self.odom.twist.twist.linear.x = d / time_elapsed
self.odom.twist.twist.angular.z = dtheta / time_elapsed
self.odom_pub.publish(self.odom)
if __name__=='__main__':
rospy.init_node('trd_driver_node')
serialport = rospy.get_param('~serialport', default='/dev/ttyUSB0')
baudrate = rospy.get_param('~baudrate', default=38400)
trd_driver = TrdDriver(serialport, baudrate)
trd_driver.run()
在两个终端中分别启动trd_driver.py和keyboard_teleop.py,并通过键盘的i
, j l键盘发布速度消息。 并查看/odom消息内容更新情况。
$ rosrun trd_driver trd_driver.py
$ rosrun trd_driver keyboard_teleop.py
$ rostopic echo /odom
用launch文件启动并加载参数¶
在trd_driver包下launch文件夹中,修改trd_driver.launch文件,将启动的节点改为 trd_driver.py 。
另外,可以将串口名和波特率传入节点。
<?xml version="1.0"?>
<launch>
<node name="trd_driver" pkg="trd_driver" type="trd_driver.py">
<param name="serialport" value="/dev/ttyUSB0" />
<param name="baudrate" value="38400" />
</node>
</launch>
考虑到trd_driver.launch文件可能会被传入参数,或被其它launch文件调用,所以最好采用arg标签指定。
<?xml version="1.0"?>
<launch>
<arg name="serialport" default="/dev/ttyUSB0" />
<arg name="baudrate" default="38400" />
<node name="trd_driver" pkg="trd_driver" type="trd_driver.py">
<param name="serialport" value="$(arg serialport)" />
<param name="baudrate" value="$(arg baudrate)" />
</node>
</launch>